《대학들에서는 교수를 철저히 깨우쳐주는 방법으로 하며 현대적인 직관, 연시수단들을 널리 리용하고 토론과 련습, 실험과 실습을 강화하여 학생들이 지식을 깊이있게 실천활동에 써먹을수 있는 산 지식으로 체득하게 하여야 합니다.》 (
축구로보트설계에서 중요한 문제는 이행방식의 설정, 적은 공간에 조종회로, 축전지, 구동장치, 엔코더 등을 어떻게 배치하는가 하는것이다.
이로부터 좌우량쪽에 배치된 2개의 바퀴들이 2개의 독립적인 전동기에 의하여 구동되는 차동구동방식의 2바퀴식이동로보트로 설계하였다. 력학적평형을 유지하기 위하여 이동로보트의 앞뒤에 베아링을 리용한 2개의 피동바퀴를 배치하였다.
축구로보트의 전원으로는 3.6V 4000mAh의 Ni-MH축전지 (니켈-수소축전지) 2개를 직렬련결하여 리용하였다.
그림 1에서는 우리가 개발한 축구로보트의 3차원설계를 보여주고있다.
축구로보트조종회로는 주조종회로와 전동기조종회로, 무선통신회로, 전원회로로 구성되여있다.
주조종회로는 각 부분회로들에 대한 설정과 조종을 진행하는 기본회로로서 8bit처리기인 STM8S103과 그의 주변회로로 이루어져있다.
이동로보트조종체계에서 주조종기는 전원감시를 진행하면서 무선지령에 대한 해석을 진행하여 2개의 바퀴들에 필요한 PWM신호를 출력하여야 하므로 비교적 많은 입출력대면부와 빠른 처리속도, 높은 믿음성을 가져야 한다. 이로부터 우리는 저전력소비와 높은 성능, 낮은 원가의 우점이 있는 STM8S103을 리용하여 주조종회로를 설계하였다.
그림 1. 축구로보트의 3차원설계
이와 함께 4통로론리구동회로를 가진 L293D를 리용하여 2개의 직류전동기의 구동회로를 설계하였으며 저전력무선통신용으로 개발된 CC1101을 리용하여 주조종콤퓨터와의 무선통신을 실현하였다.
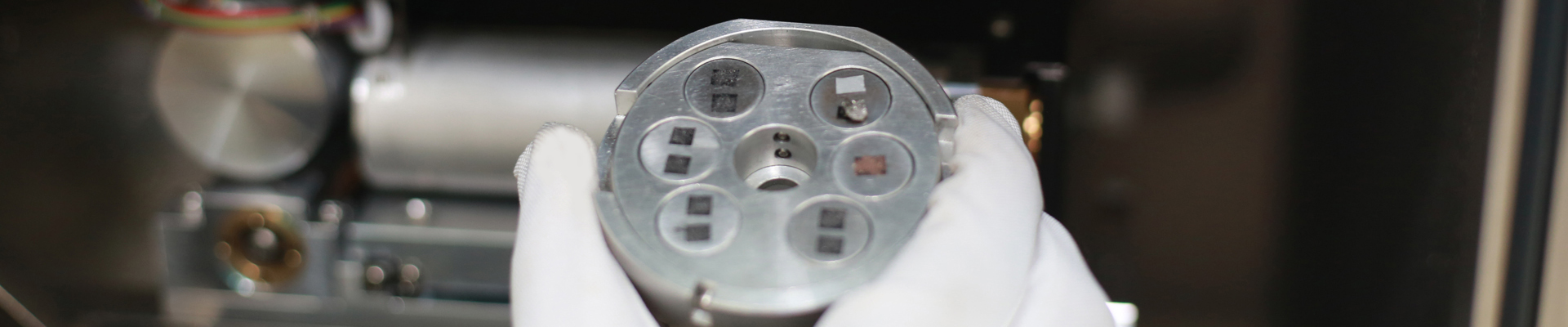
그림 2에서는 우리가 개발한 축구로보트의 사진을 보여주고있다.
그림 2. 축구로보트의 사진
이와 같이 우리는 한소편콤퓨터를 리용하여 축구로보트를 설계제작함으로써 높은 실시간성과 정확도를 보장할수 있는 축구로보트경기를 대학생들의 실험에 적극 리용할수 있게 되였다.